






Bausätze des Ortsverbandes S09

Die Dokumentation unserer Bausätze findet ihr auf dieser Seite.
Diese enthalten die Schaltpläne, Bedienungs- und Aufbauanleitung.
Sofern wir Mikrocontroller in den Bausätzen verwenden, gibt es hier auch die zugehörigen Programme.
Die Anleitungen werden überarbeitet, wenn wir Fehler entdecken, bzw. Tipps für Verbesserungen erhalten.
Ideen für neue Bausätze bzw. Programmanpassungen sind willkommen.
73 Uwe (funk@uliedtke.de)
Bausatz LED Thermometer
Bausatz LED Thermometer

Wer seine ersten Erfahrung mit Mikrocontrollern machen möchte, kann an diesem Tag unter Anleitung diesen Bausatz aufbauen und dann natürlich auch mitnehmen.
Ziel des Bausatzes ist es, eine nette elektronische Kleinigkeit aufzubauen, die einerseits einen gewissen Nutzen hat. Andererseits steht der Spaß und die Erfahrung beim Aufbau im Vordergrund, entsprechend sollte der Bauteilpreis möglichst gering sein. Durch den Einsatz von SMD-Bauteilen (Bauteile in Oberflächenmontage anstatt durch Löcher zu steckender Drähte) für wesentliche Elemente außer den LEDs selbst sowie eines Mikrocontrollers zum Realisieren der eigentlichen Funktionalität soll ein Gefühl für zeitgemäße Elektronik vermittelt werden. Die Wahl der Gehäusegrößen ist dabei ein Kompromiss bezüglich der Handhabbarkeit für die Handlötung mit nur einfachen Hilfsmitteln (Lupe und Pinzette).
Bedienungsanleitung
Das Thermometer beginnt mit dem Einsetzen der Batterien mit seiner Arbeit. Einen separaten Ein-/Ausschalter gibt es nicht. Die erwartete Batterielebensdauer für zwei übliche LR03-Zellen (Alkaline) beträgt mehrere Wochen. Die jeweils aktuelle Temperatur wird durch eine helle LED signalisiert, die entweder blinkt (halber aktueller Skalenwert) oder dauerhaft leuchtet (voller Skalenwert). Im Bandbetrieb (s.u.) werden die LEDs links der aktuellen LED mit geringer Helligkeit zusätzlich aktiviert, im Punktbetrieb bleiben sie dunkel. Ist die Temperatur geringer als der untere Skalenwert, so blinkt die erste LED abgedunkelt. Bei einer Temperatur oberhalb des Maximalwertes blinken alle LEDs abgedunkelt.
Jumper JP1 legt die Wahl des Anzeigebereichs fest. Ist er gesteckt, dann ist der vorgesehene Bereich 12 °C bis 32 °C, die mittlere LED signalisiert 22 °C („Wohlfühltemperatur“ im Wohnzimmer). Ist er gezogen, ist der Bereich von 0 °C bis 40 °C vorgesehen, mittlerer Wert 20 °C (Außentemperaturbereich).
(Gezogene Jumper steckt man zweckmäßig auf nur einen der beiden Steckerstifte, damit sie nicht verloren gehen.)
Jumper JP2 schaltet, wenn er gesteckt wird, die Firmware in einen Justiermodus. Damit kann die angezeigte Temperaturskala geschoben werden, um Exemplarstreuungen des Temperatursensors auszugleichen. Prinzipiell ist dadurch natürlich eine beliebige Verschiebung der oben genannten Skalenbereiche realisierbar.
Zum Justieren benötigt man eine Pinzette o.ä., mit der sich immer zwei Anschlüsse von J3 kurzzeitig verbinden lassen. Verbindet man dabei Pins 1 und 6 (links unten und rechts oben), dann erhöht sich die angezeigte Temperatur. Verbindet man Pin 3 und 6 (unten Mitte und rechts oben), verringert sie sich. Schließlich kann man durch Verbinden von Pin 4 und 6 (oben Mitte und rechts oben) zwischen Band- und Punktanzeige wechseln. Achtung! Niemals Pins 2 und 6 verbinden (links und rechts oben), denn damit wird die Batterie kurzgeschlossen.
Nach erfolgter Justage wird JP2 wieder herausgezogen. Die Einstellungen werden dann in einem nicht flüchtigen Speicherbereich innerhalb des Mikrocontrollers hinterlegt, sodass sie auch nach einem Batteriewechsel erhalten bleiben.
Beschreibung der Schaltung
Übersicht
Zentrales Element der Schaltung ist ein so genannter Mikrocontroller (U1 im Schaltplan, nachfolgend „Controller“ genannt). Dabei handelt es sich um einen kleinen Computer, der außer der CPU den kompletten Programm- und Arbeitsspeicher auf dem Chip enthält sowie verschiedene Peripheriegeräte, über die er mit seiner Umwelt kommunizieren kann. Wie alle digitalen Schaltkreise in CMOS-Technik benötigt er einen Kondensator an seinen Betriebsspannungsleitungen (C1), der wie eine kleine Batterie wirkt für die teils sehr kurzen aber intensiven Stromimpulse, die er im Betrieb aufnimmt.
Wesentliche vom Controller anzusteuernde Elemente sind die Leuchtdioden (LEDs) D1 bis D11. Sie benutzen insgesamt 6 der verfügbaren 11 Anschlüsse (Portpins). Von den verbleibenden 5 Anschlüssen werden drei für die Programmierschnittstelle J3 verwendet. Wenn das Programm läuft, kann man über diese drei Anschlüsse außerdem die Justage der Temperaturanzeige sowie die Umschaltung zwischen Punkt- und Bandbetrieb der LEDs vornehmen. Die letzten beiden verbleibenden Portpins schließlich werden für die Abfrage der beiden Steckbrücken (so genannte „Jumper“, JP1 und JP2) benutzt.
Der Schaltungsteil links oben (U2, C2, R1) ist optional. Damit ließe sich ein externer Temperaturfühler anschließen. Für den Bausatz wurde vorerst vor allem aus Kostengründen auf diese Variante verzichtet, da der im Controller enthaltene interne Sensor sich (nach Justage) als ausreichend für diese kleine Thermometer-Schaltung erwiesen hat.
Anschluss der LEDs
Die LEDs sind in Gruppen zu je sechs LEDs an je drei Portpins des Controllers geschaltet. Jede einzelne LED wird dabei nur einen Bruchteil der gesamten Zeit eingeschaltet. Die Trägheit des Auges lässt uns dies als Dauerlicht erscheinen, sofern das Einschalten häufig genug erfolgt. Grundsätzlich bezeichnet man eine solche Anordnung als „(zeit-)multiplex“, der Sinn des Ganzen ist eine Einsparung von Portpins im Vergleich zu einem direkten Anschluss der LEDs (je LED ein Portpin). Im vorliegenden Fall wurde dabei die „Charlieplexing“ genannte Variante der Anschaltung benutzt, die mit sehr wenigen Portpins auskommt: wenn man N Portpins zur Verfügung hat, kann man N · (N - 1) LEDs damit ansteuern. Dies wird möglich, indem man die Pins dynamisch (sehr schnell, innerhalb von Mikrosekunden) nicht nur als Ausgang mit positivem oder negativem Potenzial sondern auch als „unbeteiligt“ (englisch tri-state) festlegen kann. Als Nachteil entsteht dabei, dass man pro Zeiteinheit immer nur eine einzige LED ansteuern kann. (Beim klassischen Multiplexing werden die LEDs in einer Matrix angeordnet, und man kann pro Zeiteinheit bis zu eine ganze Zeile bzw. Spalte gleichzeitig bedienen.) Die LED muss daher innerhalb dieses Zeitschritts einen genügend hellen Lichtimpuls erzeugen, damit der Lichteindruck im Auge ausreichend für die nachfolgende lange Dunkelperiode ist. Als Kompromiss wurden daher die vorgesehenen LEDs in zwei Gruppen zu je 6 LEDs eingeteilt, sodass jede von ihnen, wenn sie eingeschaltet ist, 1/6 der Zeit von Strom durchflossen wird.
Die sechste LED der zweiten Gruppe wurde weggelassen: mit einer ungeraden Anzahl von LEDs ergibt sich bei der vorgesehenen symmetrischen Skala eine einzelne LED, die genau in der Mitte liegt und den Zentralwert der Anzeige darstellt (22 bzw. 20 °C, je nach Messbereich).
Warum haben die LEDs nun keinen Vorwiderstände? Normalerweise kann man eine LED nicht einfach direkt an eine Spannungsquelle wie eine Batterie anschließen: ihre Betriebsspannung variiert stark mit der LED-Farbe und unterliegt Exemplarstreuungen im Rahmen der Produktion sowie verändert sich mit der Temperatur. Die Helligkeit der LED hängt einigermaßen linear von der Stärke des Stroms ab, der durch sie fließt. Daher schaltet man sie üblicherweise mit einem Vorwiderstand an eine Spannungsquelle, über den der durch sie fließende Strom festgelegt wird. In unserem Falle übernehmen die Ausgangstransistoren im Controller die Funktion des Vorwiderstands. Durch den Betrieb mit nur 3 V (Nennspannung) haben diese Transistoren bereits einen recht hohen Innenwiderstand im eingeschalteten Zustand. Unsere LEDs wiederum benötigen typisch etwas über 2 V Betriebsspannung für sich („Flussspannung“ genannt), es bleibt also ohnehin nur wenig Spannungsdifferenz für die Vorwiderstände übrig. Da wir durch das Multiplexing außerdem mit kurzen Lichtblitzen arbeiten, muss ohnehin der Strom durch die gerade aktive LED 6mal so hoch sein, wie wenn man sie dauerhaft mit Gleichstrom betreiben würde. Alles in allem genügt daher die Anschaltung ohne zusätzliche Widerstände gerade so, dass die LEDs im Multiplexbetrieb überhaupt noch die gewünschte Helligkeit erreichen. Zusätzlicher Vorteil: es verringern sich die Materialkosten, und es ist weniger Lötarbeit nötig. Als Nachteil muss in Kauf genommen werden, dass sie mit entladener Batterie sichtbar dunkler werden.
Temperatursensor
Als Temperatursensor fungiert eine interne Schaltung im Controller, an der bei entsprechender Aktivierung eine temperaturabhängige Spannung entsteht. Diese wird mit einem so genannten ADC (Analog-Digital Converter) in einen Computer-Zahlenwert umgewandelt und von da entsprechend einer vom Hersteller angegebenen Formel umgerechnet. Dabei ist infolge von Fertigungstoleranzen der Wert dieser Spannung für eine bestimmte Temperatur (bspw. 20 °C) für ein bestimmtes Controller-Exemplar nicht sehr exakt vorhersagbar, sodass wir eine Möglichkeit zur Justage des fertigen Geräts benötigen. Die Veränderung der entsprechenden Spannung mit der Temperatur (der „Temperaturkoeffizient“ dieser Spannnung) hingegen ist weitgehend durch physikalische Effekte dominiert und daher vorab bekannt, sodass für einfache Anwendungen die Justage bei einer einzigen Temperatur bereits ausreichend ist.
Programmierschnittstelle
Als Programmierschnittstelle fungiert der 6polige Steckverbinder J3, der sich unten in der Mitte der Platine befindet. Es handelt sich dabei um eine so genannte ISP-Schnittstelle (In-System Programming), d.h. der Controller muss zum Einbringen eines neuen Programms („Flashen“ genannt, da es im Controller in Flash-Speicherzellen hinterlegt wird) nicht aus der Schaltung entnommen werden. Die für die Programmierung benutzten Portpins lassen sich außerhalb des Programmierbetriebs wie reguläre Portpins benutzen, weshalb wir sie für die Justagemöglichkeit verwenden. Für die Programmierung selbst benötigt man einen entsprechenden Programmieradapter, der die auf dem PC vorliegende Firmware (also das Programm) dann über die ISP-Schnittstelle in den Flash-Speicher des Controllers überträgt.
Steckbrücken
Die „Jumper“ genannten Steckbrücken JP1 und JP2 werden benutzt, um im Programm des Controllers Abläufe zu ändern. Zu diesem Zweck wird im Controller ein kleiner Vorwiderstand von der positiven Betriebsspannung angeschaltet. Ein gesteckter Jumper schließt dann diese Spannung nach Masse (negative Betriebsspannung) kurz, und die Software kann beim Abfragen des Pins diese Tatsache feststellen.
Beschreibung der Software
Allgemeines
Die Software für dieses Gerät wurde in der Programmiersprache C geschrieben. Diese Sprache wurde in den 1970er Jahren beim US-amerikanischen Telefonkonzern AT&T für die UNIX-Betriebssysteme ihrer Computer entwickelt vor allem mit dem Ziel, auch sehr nahe an der Hardware agierende Programmteile des Betriebssystems damit realisieren zu können statt in der bis dahin üblichen Programmierung in Assemblersprache. Aus diesem Grund ist diese Programmiersprache mittlerweile für die Programmierung von Mikrocontrollern ebenfalls sehr verbreitet, denn auch dort kommt es vor allem auf hardwarenahe Programmierung an. Zum Anderen bietet sie einiges an Komfort bis hin zur Formulierung mathematischer Ausdrücke mittels so genannter Gleitkommazahlen, bei denen mit guter Genauigkeit von sehr kleinen bis zu sehr großen Zahlen gerechnet werden kann. Dies wird im vorliegenden Fall für die Umrechnung der Spannungswerte des Temperatursensors in Temperaturwerte benutzt.
Aus dem in C geschriebenen Quellprogramm (Sourcecode) fertigt eine Werkzeugkette (Toolchain) anschließend ein maschinenlesbares Programm an, welches man bei Mikrocontrollern üblicherweise als „Firmware“ bezeichnet. Für das hier gezeigte Programm wird der freie, quelloffene Compiler GCC einschließlich seiner Begleitwerkzeuge (GNU Binutils) genutzt in der Variante für die AVR-Mikrocontroller der Firma Microchip (vormals Atmel). Ergänzt werden sie dabei durch die Programmbibliothek avr-libc, die für diese Controller-Famile viel Unterstützung für den Zugriff auf die Hardware bietet. Zum Übertragen der Firmware über die ISP-Schnittstelle wird schließlich zusammen mit einem entsprechenden Adapter (Programmiergerät) die Software AVRDude benutzt.
Programmstruktur
Während Programme auf einem PC in der Regel einen Anfang und ein Ende haben, läuft die Firmware eines Controllers nach ihrem Start unbegrenzt weiter, solange sich dieser an der Versorgungsspannung befindet. Daher wird die typische Programmstruktur einer Controller-Firmware bestimmt durch Handlungen, die nur einmalig beim Start erfolgen (Funktion setup()), gefolgt von einer Endlosschleife, innerhalb der sich die eigentliche Funktion der Firmware befindet (loop()). Diese Abfolge steht ganz am Ende des Quelltexts.
setup()
Wesentliche Aufgabe dieser Funktion ist es, die Peripherie-Baugruppen des Controllers in der gewünschten Weise einzurichten. Die vorliegende Firmware benutzt vor allem drei Peripherieblöcke des Controllers: einen Zeitgeber (TIMER1) zur zeitlichen Steuerung aller Abläufe, den AD-Wandler (ADC) für das Einlesen des internen Temperatursensors sowie die Portpins (PORT) zum Ansteuern der LEDs und Einlesen von Eingängen (Jumper, Justierfunktion). Weiterhin wird der im Controller enthaltene EEPROM genutzt, um die Justierdaten zu hinterlegen. Deren aktueller Zustand wird daher beim Start des Programms eingelesen und im Arbeitsspeicher abgelegt.
TIMER1
Der Zeitgeber TIMER1 wird so programmiert, dass er mit 600 Hz Umlauffrequenz arbeitet. Da jede LED jeder Gruppe 1/6 der Zeit eingeschaltet ist, ergibt sich damit eine Wiederholfrequenz von 100 Hz für die LEDs, was deutlich oberhalb der Flimmergrenze des menschlichen Auges (ca. 30 Hz) ist. Zusätzlich löst der Durchlauf des Timers durch 1/20 seines Endwerts ein weiteres Ereignis (TIM1_COMPB_vect)aus, welches dazu benutzt wird, dass die abgedunkelt dargestellten LEDs wieder ausgeschaltet werden. Beim Erreichen des Endwerts (TIM1_COMPA_vect) erfolgt ein Weiterschalten der LEDs innerhalb der jeweiligen Gruppe. Für jeden Zeitschlitz wird dabei festgestellt, ob die zugehörigen Portpins auf Ausgang/high, Ausgang/low oder hochohmig (Eingang) geschaltet werden müssen. Diese Entscheidung erfolgt in der Funktion led_update(). Die Funktion led_dim() entscheidet beim Durchlauf des Timers durch 1/20 des Endwerts darüber, ob sich die aktuelle LED in einem abgedunkelten Zustand („dim“) befindet und daher vorzeitig abzuschalten ist.
Nach dem Weiterschalten des LED-Charlieplexings wird noch eine interne Variable weitergezählt. Erreicht sie den halben Wert der Frequenz des Zeitgebers (was nach 0,5 s der Fall ist), dann wird einerseits eine neue Temperaturmessung im AD-Wandler gestartet, andererseits werden die Werte der Justier-Anschlüsse eingelesen und intern in der Variablen calib_jumpers hinterlegt. Daraus ergibt sich, dass die Justierfunktion jeweils maximal ein Ereignis pro 0,5 s verarbeiten kann.
ADC
Der AD-Wandler ist dauerhaft voreingestellt auf Kanal 8, welcher mit dem internen Temperatursensor verbunden ist. Nach dem Start durch den Zeitgeber benötigt er eine kurze Zeit (knapp 2 ms), um sein Ergebnis zu ermitteln. Dieses wird in der Interrupt Service Routine (ISR) ADC_vect() in einer globalen Variablen adc_result hinterlegt, von wo es später abgeholt wird, um die tatsächliche Temperatur zu ermitteln. Dieser Wert ist erst einmal nur ein Zahlenwert, der die gemessene Spannung relativ zu einer Referenzspannung in Höhe von 1,1 V auf 1024 Schritte aufteilt; der Wert 0 entspricht also 0 V, der Wert 1023 entspricht 1,1 V.
display_temperature()
In dieser Funktion erfolgt die Umwandlung des gemessenen Spannungswertes vom Temperatusensor in die LED-Anzeige. Zuerst wird dabei die Temperatur gemäß der Formel aus dem Datenblatt ermittelt unter Berücksichtigung des Justierwertes (calib_data.t_offset). Danach wird in Abhängigkeit davon, ob JP1 gesetzt oder gezogen ist, ermittelt, welche LEDs wie zu aktivieren sind. Zuerst werden dabei alle LEDs auf „OFF“ gesetzt, danach werden die LED-Muster für die Temperaturanzeige in den Vektor leds[] eingetragen, aus dem dann der Algorithmus fürs Charlieplexing die jeweiligen Aktivitäten an den Portpins zyklisch ermittelt.
Justierfunktion
Nachdem das LED-Muster für die aktuelle Temperatur ermittelt worden ist, fragt die Funktion loop() die Stellung des Jumpers JP2 ab. Wird bei diesem erkannt, dass ein bislang gesteckter Jumper (Justierfunktion, Variable opmode im Programm hatte den Wert CALIBRATION) nun gezogen worden ist, so werden die aktuellen Justierdaten in den EEPROM zurückgeschrieben, damit sie bei einem Neustart des Programms von da eingelesen werden können. Falls sich das Programm im Justiermodus befindet, werden mit jedem Halbsekundenschritt hier die entsprechenden Werte für Band-/Punktbetrieb und Temperatur-Offset nachgeführt.
Nachdem die Funktion loop() dies erledigt hat, versetzt sie die CPU in den Schlafzustand, um Energie sparen zu können. Die Peripheriegeräte arbeiten in diesem Zustand entsprechend ihrer Programmierung uneingeschränkt weiter und bestimmen damit den weiteren Ablauf.
Update 2022-06-17
Die global Chipkrise bewirkt, dass wir für die anstehenden Veranstaltungen in den TSD froh sind, statt der ursprünglichen ATtiny44A wenigstens die kleineren ATtiny24A kaufen zu können. Leider war der ursprüngliche Code geringfügig größer als die nunmehr zur Verfügung stehenden 2048 Bytes im Flash. Ein wesentlicher Anteil des ursprünglichen Flash-Verbrauchs ging darauf zurück, dass die Rechnung mit Gleitkommazahlen durchgeführt worden ist, um den im Datenblatt erwähnten Korrekturfaktor gegenüber dem Idealwert bei der Temperaturmessung zu berücksichtigen. Da aber letztlich der Korrekturfaktor zu 0,996 ermittelt worden war, also nur 0,4 % Abweichung vom Idealfall, und da dieser geringe Unterschied mit der recht groben Auflösung der 11 LEDs in der Anzeige kaum ins Gewicht fällt, wurde er einfach weggelassen. Damit kann die komplette Rechnung mit ganzen Zahlen (integer) erfolgen, und der Code passt nunmehr bequem in den Flash des ATtiny24A hinein.
Bausatz Nachtlicht
Bausatz Nachtlicht
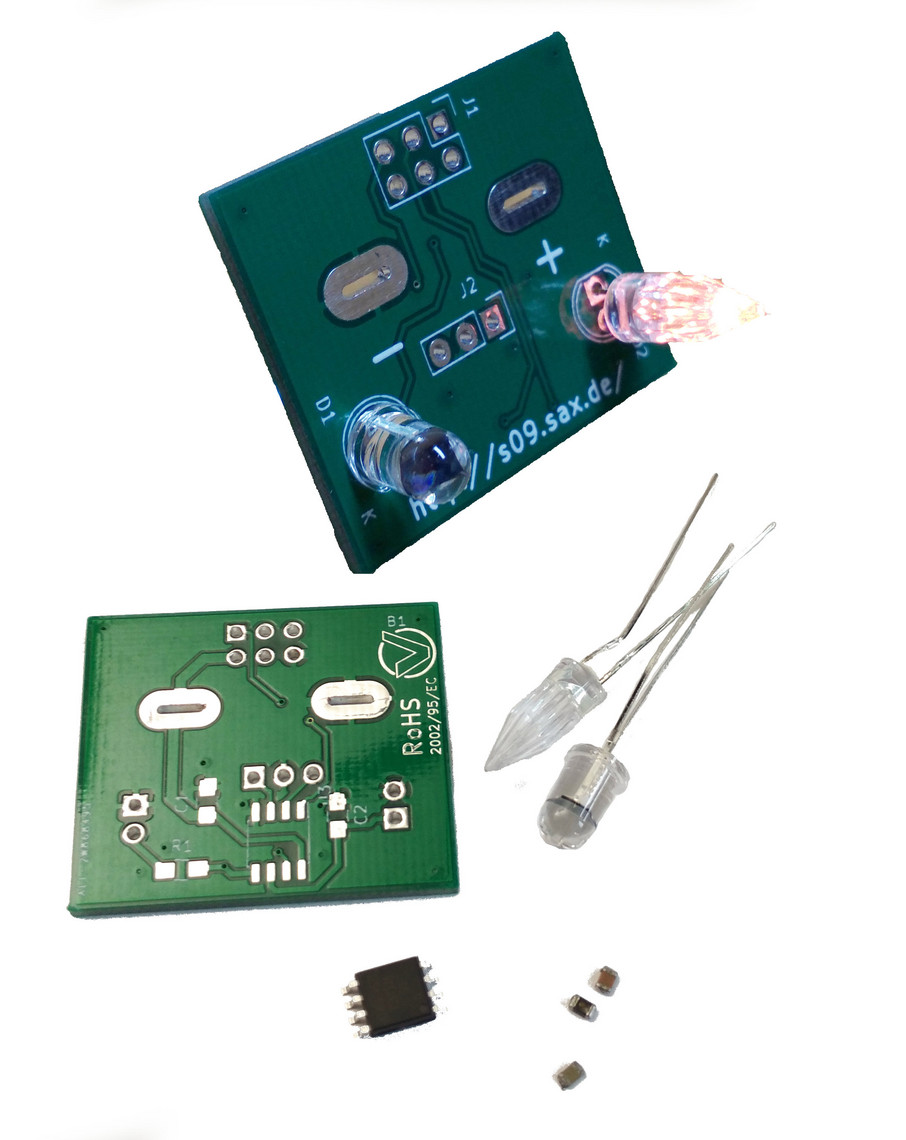
Aufbau
Für die Nachtlichtfunktion wird eine Leuchtdiode benötigt und ein Lichtsensor. Da der Unterschied der zu erfassenden Beleuchtungsstärken zwischen „dunkel“ und „hell“ viele Größenordnungen umfasst, und möglichst keine Justage bezüglich irgendwelcher Bauteil-Parameter nötig sein sollte, wurde eine Schaltung mit einer Silizium-Fotodiode PD333-3C/H0/L2 (Fa. Everlight) verwendet. Der Fotostrom einer Fotodiode ist sehr proportional zur einfallenden Lichtstärke. Um den damit in mehreren Zehnerpotenzen variierenden Fotostrom messen zu können, ohne sich auf bestimmte Werte für Widerstände in einem Spannungsteiler (und damit auf konkrete Bauteilparameter) festlegen zu müssen, wird die Fotodiode in Sperrrichtung so betrieben, dass sie einen kleinen Kondensator entlädt, der zuvor kurz auf Betriebsspannung geladen worden ist. Die Zeit, bis die Kondensatorspannung unter einen Referenzwert gefallen ist, wird gemessen. Sie ist umgekehrt proportional zur einfallenden Lichtstärke.
Als Leuchtdiode wurde eine so genannte „Rocket-LED“ gewählt, die von Conrad Elektronik vertrieben wird und die durch ihre Gehäusegestaltung eine angenehme Ausleuchtung der Umgebung bei den verfügbaren Betriebsströmen (10 … 20 mA) bietet. Diese LED ist letztlich das teuerste Bauteil des Bausatzes, wurde aber wegen ihrer Ästhetik und Lichtstärke als optimal empfunden.
Der Mikrocontroller ATtiny13A bietet als kleinster Controller der klassischen AVR-Baureihe der Firma Microchip (vormals Atmel) ausreichend Pins sowie Hardware-Voraussetzungen für die gewünschte Funktion – es verbleiben am Ende noch zwei freie Pins, die auf den Steckverbinder J2 geführt worden sind. Auf diese Weise ist es möglich, das Verhalten der Software ohne Änderungen der Schaltung später zu beeinflussen.
Beim Aufbau ist es wichtig, dass der Mikrocontroller entweder vorab (in einer Klemmfassung) mit seiner Software befüllt worden ist. Soll er in der Schaltung programmiert werden (ISP, In-System Programming, über J1 möglich), so ist dies nur machbar, solange Kondensator C2 noch nicht bestückt ist. Dieser Kondensator würde die Antwort auf die Programmierimpulse, die der Controller an MISO zurücksendet, wechselspannungsmäßig kurzschließen, sodass der Programmieradapter keinerlei Kommunikation vorfindet.
Funktion
Kondensator C2 am Anschluss PB1 des Controllers wird in regelmäßigen Intervallen von der Software kurz aufgeladen. Dazu wird der Anschluss 50 µs lang auf „Ausgang“ mit Potenzial „high“ geschaltet. Gleichzeitig wird der Analog-Komparator (eine eingebaute Baugruppe zum Vergleich zweier Spannungswerte) aktiviert, für den PB1 den negativen Eingang bildet. Der positive Eingang wird an die interne Spannungsreferenz von 1,1 V geschaltet. Nachdem PB1 wieder auf „hochohmig“ zurückgeschaltet worden ist, entlädt der Fotostrom der Fotodiode D1 den Kondensator C2. Sobald seine Spannung unter die Referenzspannung von 1,1 V gefallen ist, schaltet der Ausgang des Komparators um und löst in der Software einen so genannten Interrupt aus, eine Unterbrechungsanforderung der gerade laufenden Tätigkeit. Der Komparator wird wieder abgeschaltet, und das Hauptprogramm bekommt signalisiert, dass der LED-Status aktualisiert werden kann. Dazu wird ermittelt, wieviel Zeit seit dem Start der Messung vergangen ist. Diese Zeit beträgt bei hellem Licht weniger als 1 ms, bei völliger Dunkelheit mehr als 10 s.
Die Software bewertet alle gemessenen Zeiten kleiner 200 ms als „Tagbetrieb“. In diesem Falle wird sofort nach der Messung der Controller wieder in den Tiefschlaf versetzt, bei dem seine Stromaufnahme auf ca. 6 µA absinkt. Dieser Wert liegt nur geringfügig über der Selbstentladung der Batterien, sodass die Batterien in dieser Betriebsart sehr lange halten können. Hierin liegt ein wesentlicher Vorteil der Realisierung mit einem Mikrocontroller – eine rein herkömmlich aufgebaute Schaltung hätte bei Tageslicht einen vielfach größeren Energiebedarf.
Während des Tiefschlafs wird der Controller einmal pro Sekunde durch eine „Watchdog“ genannte Unterbrechungsanforderung aufgeweckt. Dieser Wachhund dient normalerweise dazu, einen Mikrocontroller, dessen Hard- oder Software sich aufgrund irgendwelcher Ereignisse festgefahren hat, durch einen kontrollierten Reset aus diesem Zustand zu befreien. Im ATtiny13A ist es zusätzlich möglich, stattdessen ein regelmäßiges Aufwachen eines ansonsten nahezu ausgeschalteten Controllers zu bewirken. In der Behandlung dieses Ereignisses wird dabei ein Zähler hochgezählt. Wenn der Zähler 10 s gezählt hat, wird eine erneute Messung der Lichtstärke angeregt.
Ergab die Messung eine Zeit von 500 ms, dann wird dieser Wert als Dunkelheit bewertet. Um im Falle völliger Dunkelheit, bei dem die Entladung 10 s und länger dauern kann, nicht die komplette Zeit abwarten zu müssen, wird nach Ablauf dieser Zeit die Messung ggf. zwangsweise beendet, denn zu diesem Zeitpunkt steht ja das Ergebnis der Messung („Dunkelheit“) bereits fest, und die LED wird eingeschaltet.
Wenn die Messung Zeiten zwischen 200 und 500 ms ergab, wird die LED mit vermindertert Helligkeit betrieben, sodass sich eine Helligkeitsregelung ergibt. Da der Energiebedarf der Lichtstärkemessung bei eingeschalteter LED nicht mehr ins Gewicht fällt, wird die Messung in dieser Zeit dauerhaft wiederholt, was zu einer relativ schnellen Reaktion auf Helligkeitsänderungen führt. Im Gegensatz dazu muss für den Übergang von Tag- auf Nachtbetrieb (bspw. beim Ausschalten der Raumbeleuchtung) bis zu 10 s gewartet werden, bevor die Reaktion sichtbar ist.
Der Vorwiderstand R1 dient der Begrenzung des Stroms durch die LED. Er wurde mit 27 Ω bewusst gering gewählt, da letztlich an ihm während des Betriebs nur nutzlos Batterie-Energie verheizt wird. Stattdessen erfolgt die Steuerung des effektiven LED-Stroms durch eine so genannte Pulsweitenmodulation (PWM), die als Maximalwert eine Einschaltdauer von ca. 60 % festgelegt hat. Wird die auf den Stecker J2 eine Steckbrücke zwischen Kontakte 1 und 2 (Pin 1 ist auf der Seite, wo sich die LED befindet) gesteckt, wird ein Energiesparbetrieb aktiviert, der die Einschaltdauer auf ca. 30 % reduziert und damit die Batterielebensdauer auf Kosten einer geringeren LED-Helligkeit verdoppelt.
Wird beim Einschalten des Geräts auf J2 eine Steckbrücke zwischen den Kontakten 2 und 3 vorgefunden, dann wird statt des Nachtlichts die Funktion „Kerze“ aktiviert: ein Flacker-Betrieb mit ständig wechselnder Helligkeit. Da für einen (halbwegs) echten Zufallsgenerator kein ausreichender Programmspeicher mehr im ATtiny13A vorhanden war, wird ein Pseudo-Zufall eingerichtet, bei dem im 1,7-ms-Intervall des Timers aus einer Tabelle ein neuer Helligkeitswert und aus einer zweiten Tabelle eine neue Wartezeit entnommen wird, nach der die nächste Aktion erfolgen soll. Beide Tabellen haben unterschiedliche Längen, die außerdem noch als Primzahlen ausgeführt sind, sodass die sich insgesamt ergebende Periodizität nicht mehr optisch wahrnehmbar ist.
Dokumente
<Download Kicad-Designdaten (Zip-Archiv)>
<Download Software (Zip-Archiv)>
Idee und Entstehung
Ausgehend von den Erfahrungen beim Aufbau des „Thermometer“-Bausatzes entstand die Idee, einen möglichst einfachen und in maximal 20 Minuten aufzubauenden Bausatz bereitzustellen, dessen Bauteilkosten maximal 5 Euro betragen sollen. Es sollte auch nicht nur eine ganz simple LED-Blinkschaltung sein, die es schon so häufig gibt (und die man mittlerweile als Blink-LED gleich als komplettes Bauteil kaufen kann). Ein OM des Ortsverbandes äußerte dann die Idee: „Mein kleiner Bruder wünscht sich immer ein automatisches Nachtlicht.“
Die Idee klang gut, als nächstes stand die Frage: „klassischer“ rein analoger Aufbau mit Transistoren, oder auch wieder einen Mikrocontroller benutzen? Nach kurzer Abwägung fiel die Entscheidung zu Gunsten des Controllers: es sind weniger Bauteile erforderlich, sodass der Aufbau einfacher ist. Weitere Vorteile der Mikrocontroller-Implementierung zeigten sich während der Realisierung: sehr geringer Energiebedarf bei Helligkeit (Tag-Betrieb), Helligkeitssteuerung der LED durch Impulsbetrieb reduziert Energie, die am LED-Vorwiderstand verheizt werden muss, zusätzliche Funktionalitäten (Energiespar-Modus, Flackerlicht) einfach über Steckbrücken realisierbar.
Mit dem ATtiny13A wurde einer der kleinsten Controller der AVR-Reihe der Firma Microchip (ehemals Atmel) gewählt, da die gesamte Funktionalität sehr einfach ist, das Bauteil preiswert (55 Cent bei Erstellung des Bausatzes) und in einem SO-8-Gehäuse mit 1,27 mm Pinabstand auch für Anfänger einfach zu löten ist.
Während der Abschlussveranstaltung des „Deutschen Multimediapreises 2019“, bei dem der Bausatz erstmals der Öffentlichkeit vorgestellt worden ist, kam die Idee auf, zusätzlich zur Grundfunktion als Nachtlicht den „Kerzen-Modus“ zu implementieren. Auf diese Weise ließ sich insbesondere am (beleuchteten) Bastel-Stand bereits eine Funktion demonstrieren, ohne dass man für die Vorführung immer erst 10 s lang den Lichtsensor abdunkeln musste. Gesagt, getan, es war noch ausreichend Programmspeicher im Controller frei und der Kontakt 3 des Steckers J2 hatte zu diesem Zeitpunkt noch keine Funktion belegt. Eine Stunde später war die entsprechende Erweiterung der Software fertig, es wurde noch ein paar Minuten an den Tabellen für den Pseudo-Zufall gefeilt, aber die ersten durch die Interessenten aufgebauten Bausätze konnten bereits diese neue Funktion benutzen. Auch dies zeigt eindrucksvoll die Flexibilität, die durch den Einsatz des Controllers anstelle herkömmlicher Schaltungstechnik erreichbar ist.
Bausatz Würfel mit Thermometer
Bausatz Würfel mit Thermometer
Die Idee zu diesem etwas aufwendigen Bausatz setzt auf unserem LED Thermometer auf.
Wir dachten uns, es ist eine gute Idee zum Medienfestival einen Bausatz anzubieten, der auch noch eine Spielfunktion enthält.
Für das Zusammensetzen benötigt man etwas mehr Zeit (60 BIS 120 Minuten), dafür hat man mit der fertigen Platine auch eine ganze Menge mehr Möglichkeiten.
Aktuell sind folgende Funktionen in der Software eingearbeitet:
1. Eine Temperaturanzeige über den internen Sensor im Atmega. Dieser interne Sensor ist nicht sonderlich genau, deshalb besteht hier die Möglichkeit einen externen Sensor zu integrieren. Aktuell erkennt die Software selbstständig ob ein externe Sensor dranhängt. Wenn dem so ist, wird dieser Sensor zur Anzeige verwendet ansonsten wird der interne Sensor ausgewertet und angezeigt.
Die Anzeige erfolgt über das LED Band. Es besteht aber zusätzlich die Möglichkeit, die Ausgabe über die Datenschnittstelle RS485 (9600 Baud) auszugeben.
Jetzt kommen die Spiele:
2. Integriert ist der Würfel für den Singleplayer. Über Jumper kann ich wählen ob ich bis zur 6 oder bis zur 7 Würfeln möchte. Durch die Anordnung der LEDs im Würfelfeld stehen hier 7 LEDs zur Verfügung.
3. Wer möchte schon immer alleine würfeln? Deshalb gibt es auch noch die Multiplayer Funktion.
Hier spielt man mit zwei Spielern. Welcher Spieler dran ist, wird durch die blauen LEDs 18 und 20 signalisiert. Gestartet wird mittels des kleinen Tasters. Das LED Band dient hier zur Anzeige des Punktestandes für den aktiven Spieler. Beide Spieler spielen mit dem selben elektronischen Würfel.
Für diese Funktion des Würfelspiels gibt es bereits eine Menge Ideen den Komfort zu erweitern. Man kann zum Beispiel über die Serielle Schnittstelle zwei Boards miteinander verbinden und dann wirklich gemeinsam und jeder auf seinem eigenen Board spielen.
Alle Funktionen lassen sich erweitern und neue hinzufügen.
Mit diesem Bausatz möchten wir euch ermutigen, eure Ideen selbst auszuprobieren.
Wer nicht programmieren kann, kann uns seine Idee mitteilen und wir implementieren diese Idee gemeinsam.